Earlier this month, I joined the perception team at EUFS(Edinburgh University Formula Student). I learned many interesting topics in autonomous vehicle perception and teamwork tools. Today, I would like to share what I’ve learned about point cloud technology.
This is a new series of for my blog, stay tuned 😎!
What is Point Cloud?
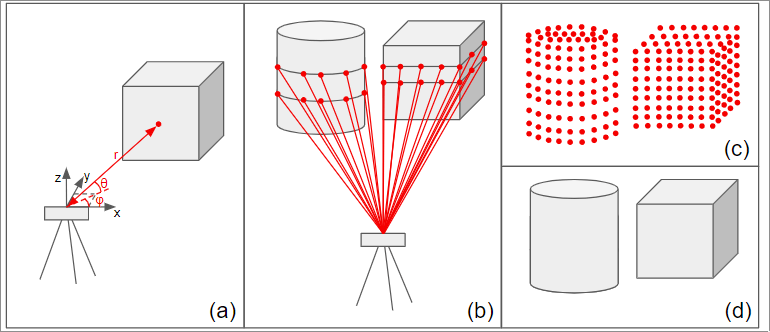
A point cloud is a collection of millions of 3D points that represent everything around you. Usually we use a sensor called LiDAR(Light Detection and Ranging) to create these point clouds.
How Point Cloud work:
- The system emits a laser pulse (usually a single-wavelength infrared light)
- measures the time it takes for the laser to reflect back. This calculates the distance and generates a 3D point cloud.
- Each point contains only the spatial coordinates (x, y, z) and the reflection intensity, without RGB color information.
Point Cloud property:
- unorder
- sparsity
- unstructured
- geometric transformability
How can we process point clouds
1.PCL
We use a popular library called PCL that provides tools for:
- Filtering: Removing noise and irrelevant points
- Segmentation: Grouping points that belong to the same object
- Clustering : Finding groups of point that might be cones
- Feature extraction: Calculating geometric properties like shapes and sizes.
2. Grid-Based Approaches
- Divide the space around the car into a 2D grid
- Count how many points fell into each grid cell
- Look for patern that match cone shapes
- Extract potential cone locations
3. PointPillars
See details in this blog: Understanding PointPillars
Common Point Cloud tasks:
- 3d shape classification: categorizing entire point clouds into object classes(car, pedestrain)
- 3d object detection and tracking: Locating objects with 3D bounding boxes and following them across frames
- 3d point cloud segmentation: Assigning a class label to every single point.
Common Library used in Point Cloud:
The point cloud ecosystem offers several powerful libraries:
- PCL: C++ library for classical algorithms
- VCGLib: Specialized for mesh processing and geometry
- CGAL: Computational geometry algorithms library
- Open3d: Python library with excellent visualization
High quality point cloud datasets:
- KITTI
- waymo
- nuScenes
Other Methods for 3D object detection:
while LiDAR is powerful, various other approaches exists for 3D perception.
- monocular camera
- D4LCN
- Mono3D-PLiDAR
- binocular camera
- Stereo R-CNN
- PSMNet
- RGB-D
- F-PointNets
- LiDAR
- PV-RCNN
- PointPillar
- PointRCNN
- RGB+Li-dar
- EPNet
- CLOCs
- 3D-CVF Each approach has trade-offs in term of accuracy, speed, cost and robustness.